Human Data Capture
A complete hardware stack for embodied AI data collection — from dexterous hands to ego-centric viewpoint logging. Every device outputs synchronized, training-ready multimodal data.
Lume Ego
Lume Ego captures the operator's first-person viewpoint, head pose, and environmental depth with onboard dual-camera stereo vision — grounding every hand interaction in real-world spatial coordinates.
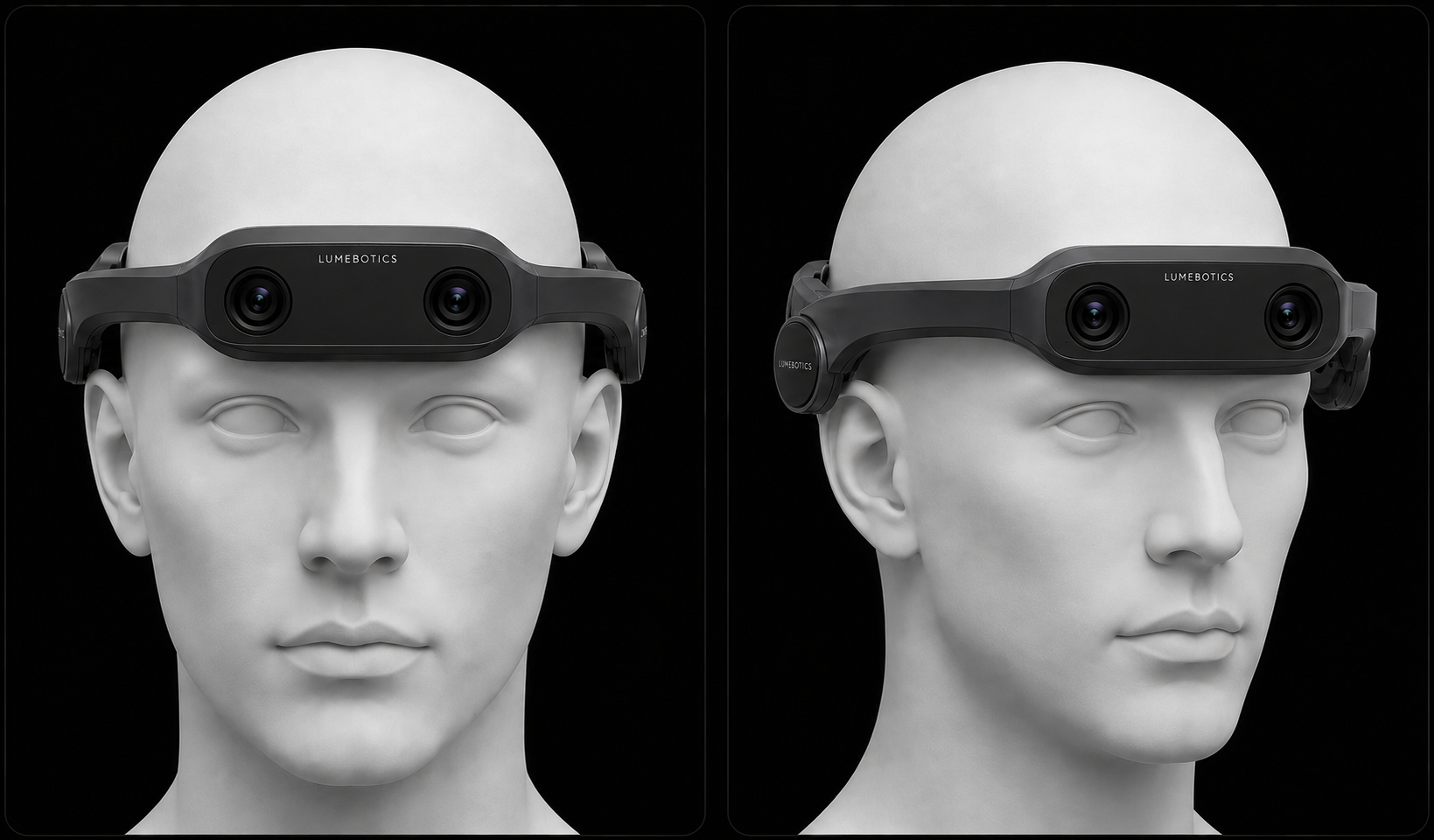
True First-Person View
Dual wide-FOV global-shutter cameras in a binocular layout. Records exactly what the operator sees with native stereoscopic coverage.
Onboard Stereo Depth
Dual-camera depth mapping per frame — head pose and scene geometry anchored to real-world 3D coordinates, no external mapping rig required.
Multi-Scene Optimized
Tuned for household, manufacturing, and logistics environments where lighting, clutter, and layout vary session to session.
Fleet Sync Architecture
Hardware-timestamped fusion with Lume Finger and Glove — one unified episode across all worn devices.
Lume Finger
A bionic two-finger device that matches human pinch kinematics at ~98% efficiency. Lume Finger combines global-shutter vision, 1mm tactile arrays, and 6-axis IMU for the most natural grasp data capture in the Lume lineup.
Bionic Two-Finger Design
Human-like pinch geometry delivers a 70% efficiency boost over generic grippers — operators move naturally, data quality follows.
3D Force Perception
0.05N sensitivity with 1mm spatial resolution across the tactile array. Captures contact pressure, slip, and grasp stability.
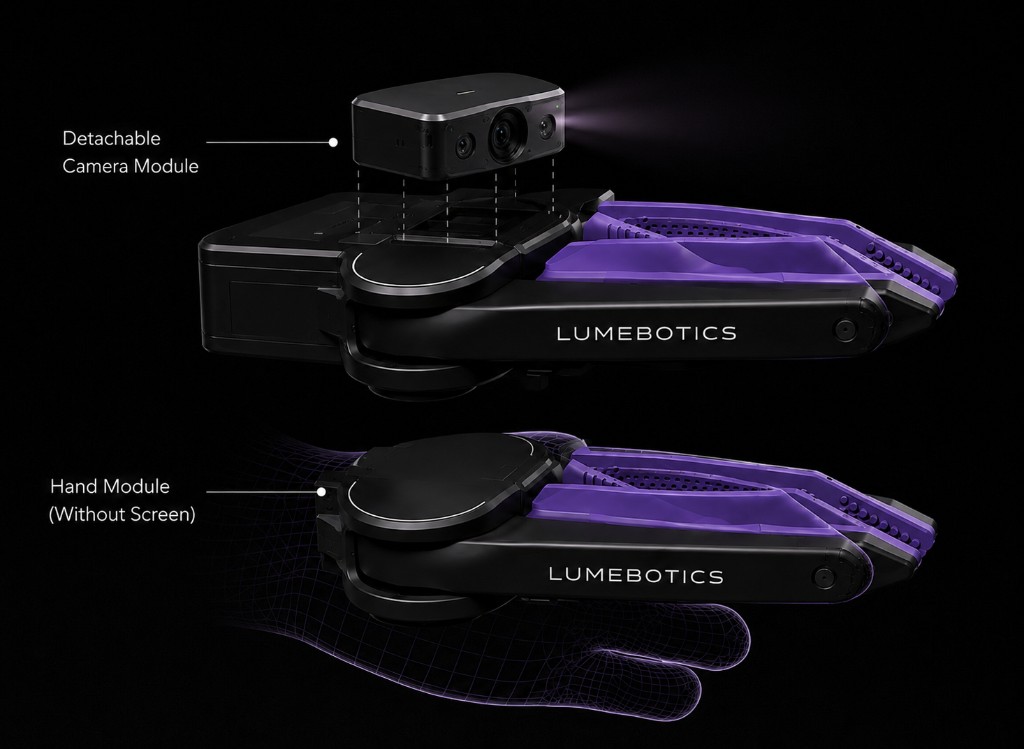
Ego + Hand Fusion
Combined first-person viewpoint and hand interaction logging in a single device — no external camera setup required.
Voice-Annotated Capture
Automatic voice annotation during recording and seamless upload to Lume Data Pipeline Platform for downstream processing and QA.
Lume Glove
Lume Glove delivers full-hand kinematics and distributed force feedback at 120Hz in a lightweight wearable form — making dexterous manipulation data capture accessible to operator networks at scale.

Full-Hand Kinematics
26-DOF skeletal tracking with sub-millimeter joint resolution — every phalanx, abduction angle, and wrist rotation logged in real time.
Distributed Force Sensing
Per-phalanx contact states and haptic feedback capture how the hand interacts with objects, tools, and surfaces.
Operator-First Wearable
Lightweight, wireless design built for hours-long sessions. No external cameras or calibration rigs required in the field.
Multi-Scenario Coverage
Validated across household chores, manufacturing assembly, and logistics handling — the full spectrum of embodied manipulation.
Capture → Process → Deliver
Lume hardware feeds directly into the Lume Data Pipeline Platform for automated cleaning, SLAM reconstruction, and annotation — then into the Data Market as training-ready datasets.